
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | |||
| 5 | 6 | 7 | 8 | 9 | 10 | 11 |
| 12 | 13 | 14 | 15 | 16 | 17 | 18 |
| 19 | 20 | 21 | 22 | 23 | 24 | 25 |
| 26 | 27 | 28 | 29 | 30 | 31 |
- digitalRead
- public
- Android
- flutter
- APP
- atmega328
- SERIAL
- detect
- c++
- Encapusulation
- Gradient
- Class
- UNO
- stream
- Unity
- parameter
- aduino
- Read
- Contour
- memory
- sensor
- edge
- mfc
- subpixel
- Filtering
- Pointer
- wpf
- Binary
- compare
- file access
- Today
- Total
폴크(FOLC)
아두이노 - 모터 제어(DC:direct current) 본문
# 고정자(영구자석)과 회전자(전기자)로 코일을 사용하여 구성
> 전기자에 흐르는 전류의 방향을 전환함으로써 자력의 반발, 흡인력으로 회전
# 특징
> 기동 토크가 크다
> 인가전압에 대하여 회전특성이 직선적으로 비례
> 입력전류에 대하여 출력 토크가 직선적으로 비례 (출력 효율이 좋다)
> 가격이 저렴하다
# 제어 방식
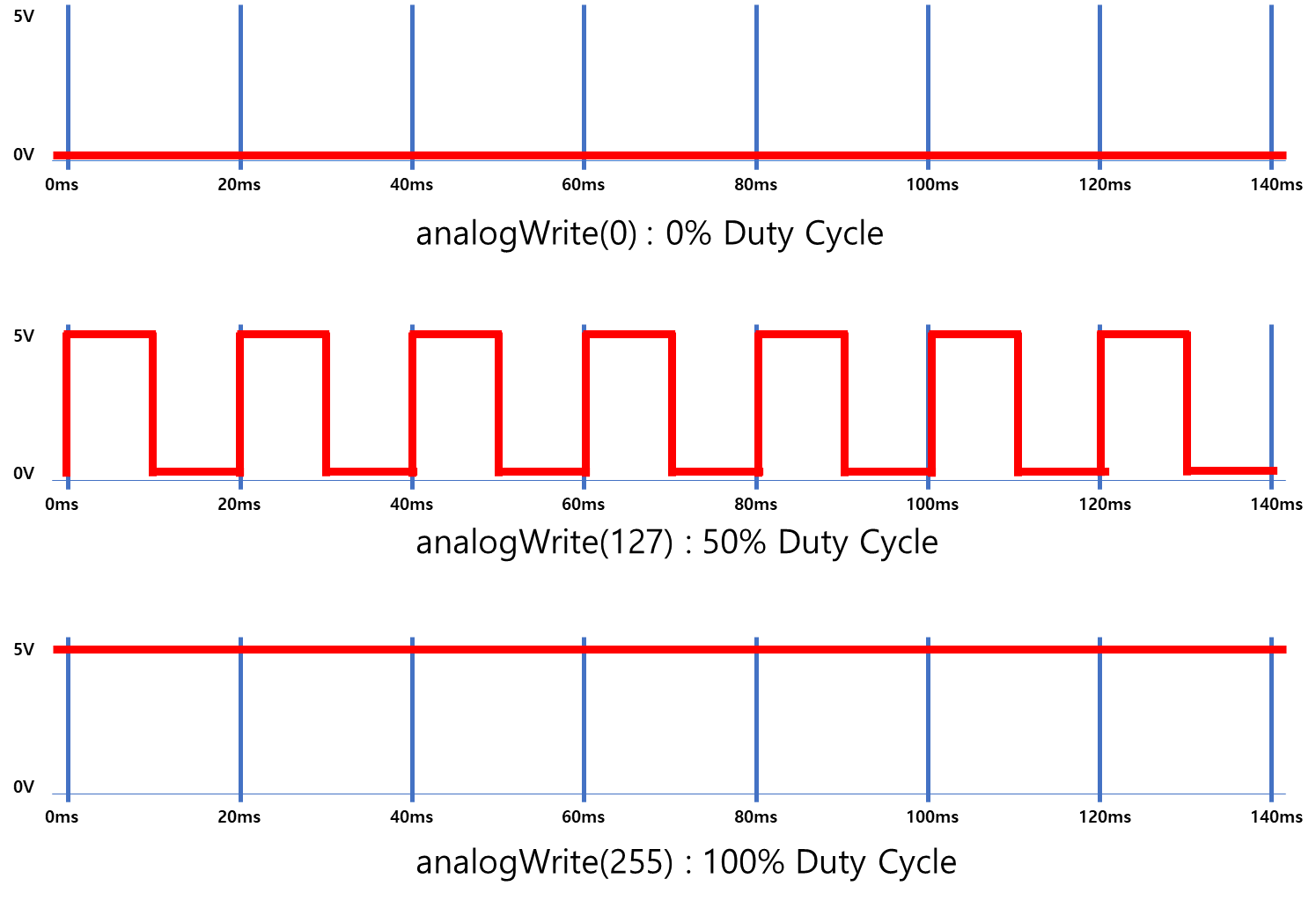
> 아날로그 방식 : 아날로그 신호 출력 제어 ( voltage 값으로 표현 )
> 디지털 방식 : 디지털 신호 출력 제어 ( 0, 1로 표현 )
### 모터 드라이버가 없는 경우
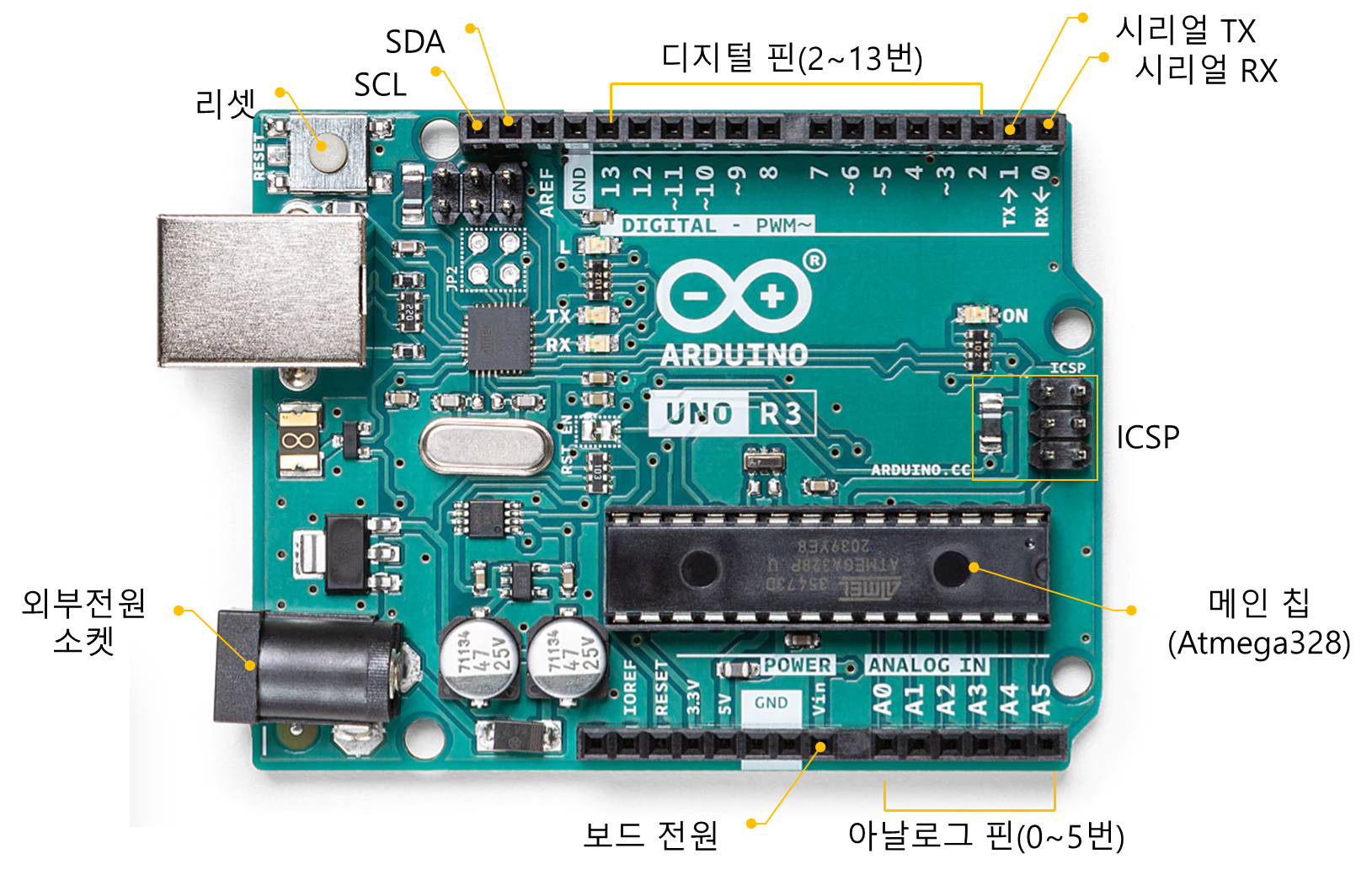
# 연결 방법
> 총 2개 핀이 있으며 2개는 전원부 ( VCC, GND )
> VCC-SIGNAL-DIGIAL PWM쪽에 D3번, GND
# 소스 코드
#define DATAPIN D3
void setup()
{
pinMode(DATAPIN, OUTPUT);
Serial.begin(9600);
}
void loop()
{
Serial.println(200);
analogWrite(DATAPIN, 200);
delay(100);
}
### 모터 드라이버가 있는 경우
# 특징
> 전압 : 5V ~ 12V
> 전류 : 2A
> 크기 : 43mm * 43mm
> 모터 2개까지 제어 가능
# 연결 방법
> 총 4개 핀이 있으며 2개는 전원부 ( VCC, GND ), 1개 D2(디지털), 1개 D3(디지털)
> VCC-5V, GND 그리고 SIGNAL-DIGIAL PWM 쪽에 D2, D3
# 모터 드라이버 ( L298N )
# 소스 코드
#define DATAPIN_OUT1 D2
#define DATAPIN_OUT2 D3
#define DATAPIN_SPEED D10
void setup()
{
pinMode(DATAPIN_OUT1, OUTPUT);
pinMode(DATAPIN_OUT2, OUTPUT);
pinMode(DATAPIN_SPEED, OUTPUT);
Serial.begin(9600);
}
void loop()
{
analogWrite(DATAPIN_SPEED, 255); // 최대 속도
digitalWrite(DATAPIN_OUT1, HIGH);
digitalWrite(DATAPIN_OUT2, LOW);
delay(1000);
// 방향을 변경하고자 하면
//digitalWrite(DATAPIN_OUT1, LOW);
//digitalWrite(DATAPIN_OUT2, HIGH);
//delay(1000);
}
'자유 게시판 - 마이크로 컨트롤러' 카테고리의 다른 글
| 아두이노 - 모터 제어(Stepping) (0) | 2022.03.27 |
|---|---|
| 아두이노 - 모터 제어(Servo) (0) | 2022.03.25 |
| 아두이노 - 토양 습도 센서 (0) | 2022.03.24 |
| 아두이노 - 수분 감지 센서 (0) | 2022.03.24 |
| 아두이노 - 라인 추적 센서 (0) | 2022.03.24 |



